模仿学习是一种很有前途的方法,可以教会机器人如何可靠地完成日常任务,例如洗碗或做饭。尽管模仿学习框架潜力巨大,但它依赖于详细的人类演示,其中应包括可以帮助使用机器人系统重现特定动作的数据。
收集这些演示的一种方法是使用遥控系统,该系统允许人类控制机器人操纵器的运动以完成特定任务。然而,大多数现有的遥控系统都难以有效地处理和重现人类执行的复杂而协调的动作。
加州大学圣地亚哥分校的研究人员最近开发了 Bunny-VisionPro,该系统可实现机器人系统的远程操作,以完成双手灵巧的操作任务。该系统在arXiv预印本服务器上发布的一篇论文中进行了介绍,可以方便收集人类的示范,以进行模仿学习。
论文共同作者王小龙告诉 Tech Xplore:“我们最近发表的论文受到了推动机器人双手灵巧遥控操作需求的启发。”
“我们认识到现有的基于视觉的遥控系统很少关注双手控制,而这对于需要手部协调的复杂任务至关重要。”
王和他的同事最近研究的主要目标是开发一种通用的遥控系统,该系统可以很好地应用于不同类型的机器人和任务,大大简化用于训练机器人控制算法的演示收集。
他们开发的系统名为 Bunny-VisionPro,可以使远程操作和演示数据的收集像在虚拟现实(VR)中玩游戏一样直观和身临其境。
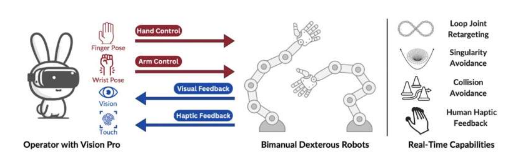
王教授解释道:“Bunny-VisionPro 是一款创新的双手灵巧遥控系统,可让人类操作员实时控制双机械臂和多指手。它能够收集高质量的演示,以促进模仿学习。”
通过团队系统远程操作的设备轻便便携。用户在远程操作该设备时,还可以获得视觉和触觉反馈,让他们的体验更加身临其境。
在初步测试中,Bunny-VisionPro 系统被发现能够实时、低延迟地安全控制机器人操纵器,同时还能防止与附近物体发生碰撞。值得注意的是,该系统还易于在实验室环境中安装和部署,使其成为在机器人实验室收集演示的有前途的解决方案。