为了在广泛的现实环境中可靠地协助人类完成日常任务,机器人应该能够有效且灵巧地操纵不同类型的物体。开发新的经济高效的机器人夹持器或其他类似手的人工系统对于实现机器人灵巧的物体操纵起着关键作用。
Improbable AI Lab 和麻省理工学院 (MIT) 的研究人员最近设计了一种新型双指机器人夹持器,旨在更有效地处理日常操作任务。
他们提出的机器人系统在预印本服务器arXiv上的一篇论文中进行了介绍,并将被纳入 IEEE ICRA 2024 会议论文集,该系统可以成功拾取具有不同形状和纹理的物体,然后将它们放置在指定位置。
“我们为能够执行 30 种不同日常任务的机器人手指提供了机械和动力学要求,”Rubén Castro Ornelas、Tomás Cantú 及其同事在论文中写道。“为了满足这些要求,我们提出了一种基于串联弹性驱动的手指设计,我们称之为日常手指。我们的重点是使手指尽可能紧凑,同时实现所需的性能。”
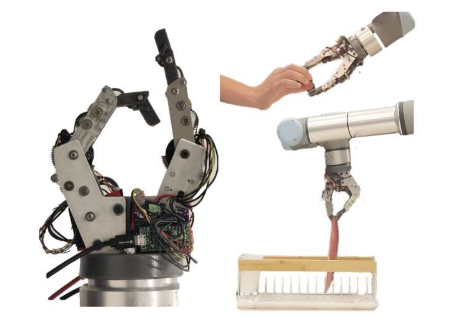
研究人员设计的机器人夹持器由一个结构组成,该结构上伸出两根机械手指。这两根手指的大小和形状都与人类手指相似,因此可以弯曲并紧紧抓住物体。
该团队的类似人类的手指旨在处理简单的日常任务,例如拾起物体并将其放置在精确定义的位置,而不是更复杂和高级的手动任务。虽然该团队最初仅使用两个机器人手指创建了一个具有 2 个自由度 (DoF) 的夹持器,但他们希望在未来创建具有更多手指的夹持器。
“我们的手指只有 2 个自由度,”研究人员写道。“有了第 3 个自由度,手掌的尺寸就会增加。在未来的迭代中,将五个手指放在一只手上会很困难,但三指甚至四指的手仍然是可能的。要制作完整的五指手,我们可能不得不等待更多扭矩密集型执行器的出现”
为了评估双指夹持器的性能,他们进行了一系列真实实验。这些实验评估了系统的速度和顺从性,以及它在完成三个基本的“拾取和放置”任务时对物体施加的力。